
3D打印机改装两进一出
3D打印机改装两进一出

tft-espi使用sprite方法实现动画效果
这个其实是为了实现早就想做的蓝牙小键盘的前置任务,也就是配合旋钮的动画效果

python的socket连接编程
使用python进行网络收发编程的常用代码记录
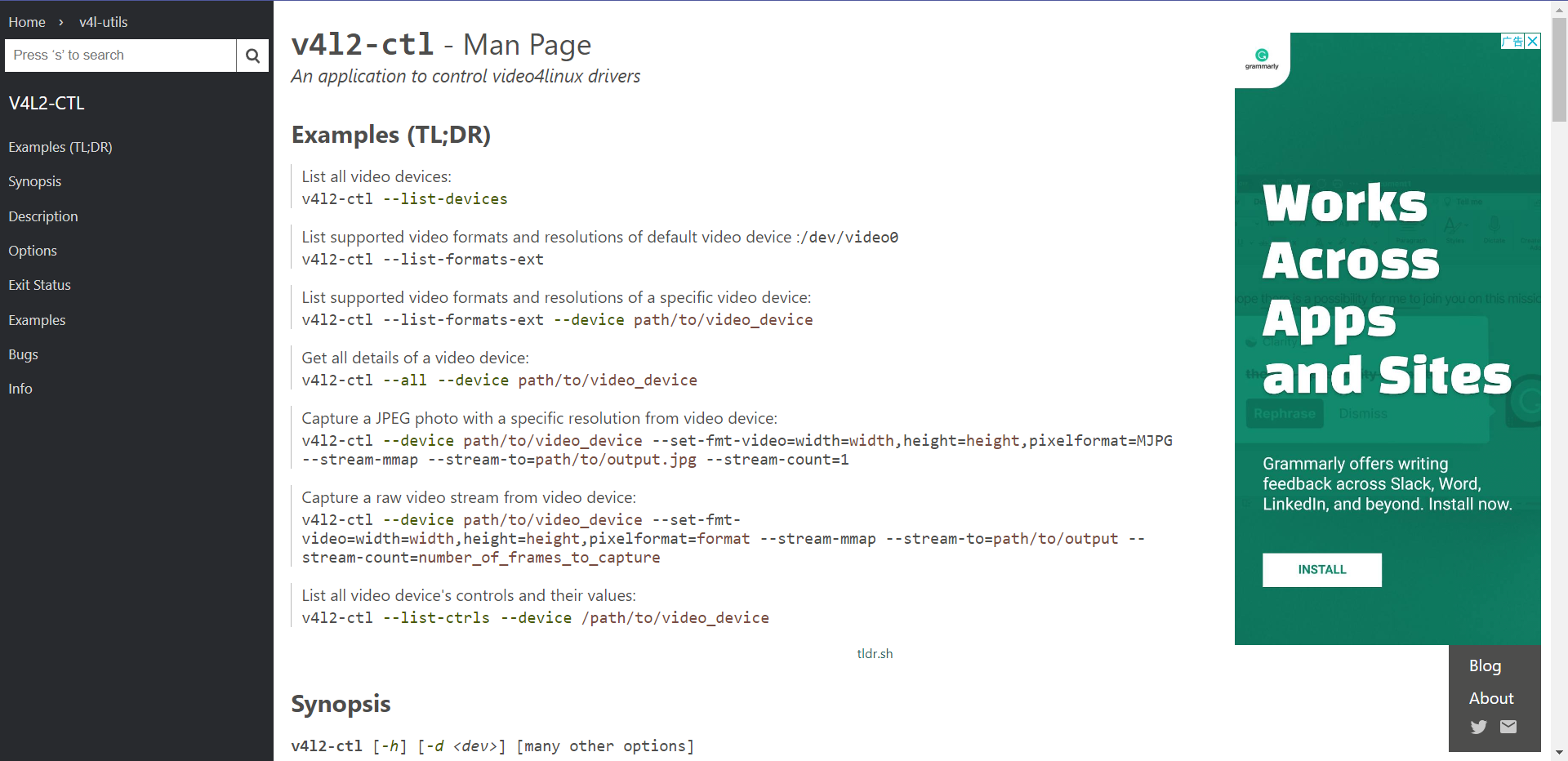
使用v4l2-ctl获取和设置摄像头参数
安装1sudo apt install v4l-utils
获取信息查看摄像头设备123456789orangepi@orangepizero2:~$ sudo v4l2-ctl --list-devicescedrus (platform:cedrus): /dev/video0 /dev/media02K USB Camera: 2K USB Camera (usb-5311000.usb-1): /dev/video1 /dev/video2 /dev/media1
查看摄像头所有参数1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465orangepi@orangepizero2:~$ sudo v4l2-ctl -d /dev/video1 --allDriver Info: Driver name ...

butterfly配置
butterfly配置

ros实操记录
这部分文章是从最基础那篇文章分离出来的,不然那个太长了hhh

使用ardupilot的四轴飞行器
晚上心血来潮随手搓个四轴玩
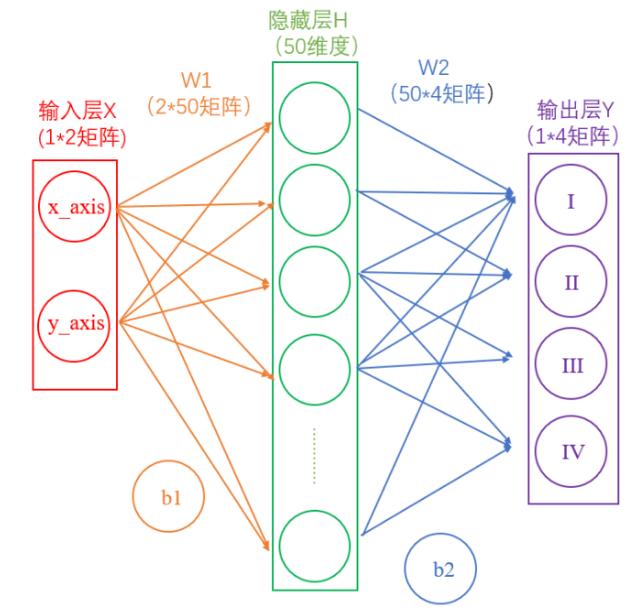
神经网络学习:从尝试识别手写数字开始
神经网络入门笔记