本科毕业设计论文:巷道移动机器人SLAM技术研究
计划完成的任务目标
- 制作一台移动机器人
- 使用三维激光雷达和毫米波雷达进行建图
- 使用深度相机和imu数据融合进行建图和导航
三维激光雷达建图的实现(LeGO-LOAM)
- 算法:LeGO-LOAM
- 激光雷达:RS-Helios-5515
通讯连接和基本配置
首先用交换机连接激光雷达和电脑,为了方便我决定在vmware中开发,系统为Ubuntu 18.04安装了ROS1-melodic。网络设置为桥接模式,系统内设置网络手动ip192.168.1.102,子网掩码255.255.255.0(雷达默认ip192.168.1.200发送udp数据包到192.168.1.102的端口6699``7788)
新建ros工作空间后src文件夹放入雷达ros驱动和雷达话题定义(驱动文档也有说明),按照里面的要求进行配置修改即可,以及LeGO-LOAM代码包,除了按照文档说明进行修改以外,还要将CMakeLists.txt第四行的c++版本14:set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14 -O3")。
设置雷达数据为我们使用的32线雷达,修改LeGO-LOAM/include/utility.h,这里我补充一些注释
1 | // Mine |
由于雷达数据的格式不同,使用rs_to_velodyne进行格式转化,A ros tool for converting Robosense pointcloud to Velodyne pointcloud format, which can be directly used for downstream algorithm, such as LOAM, LEGO-LOAM, LIO-SAM, etc.
使用rostopic list可以看到代码接收雷达topic/rslidar_points转换后发送到/velodyne_points
1 | triority@ubuntu:~/Desktop/lidar$ rostopic list |
这里我由于openGL驱动问题导致rviz报错闪退,即使不闪退也不显示任何点云,要将其改为软件驱动。由于rviz错误log为空文件导致我很久没有找到问题所在。没有在物理机上试过不知道和vmware有没有关系
1 | export LIBGL_ALWAYS_SOFTWARE=1 |
按照LeGO-LOAM文档要求在实际运行和使用rosbag时需要使用不同的roslaunch配置,具体是修改LeGO-LOAM/launch/run.launch的第四行,仿真下设置为false否则为true
1 | <param name="/use_sim_time" value="false" /> |
由于雷达驱动和LeGO-LOAM都会启动rviz,我这里直接修改雷达驱动启动文件rslidar_sdk-dev_opt/launch/start.launch注释掉rviz的启动内容
1 | <launch> |
建图测试
习惯上我喜欢先单独启动roscore
1 | roscore |
启动雷达:
1 | roslaunch rslidar_sdk start.launch |
启动雷达数据转换:
1 | rosrun rs_to_velodyne rs_to_velodyne XYZIRT XIRI |
启动建图:
1 | roslaunch lego_loam run.launch |
这时就可以使用激光雷达的数据进行建图了,下图是我所在的实验室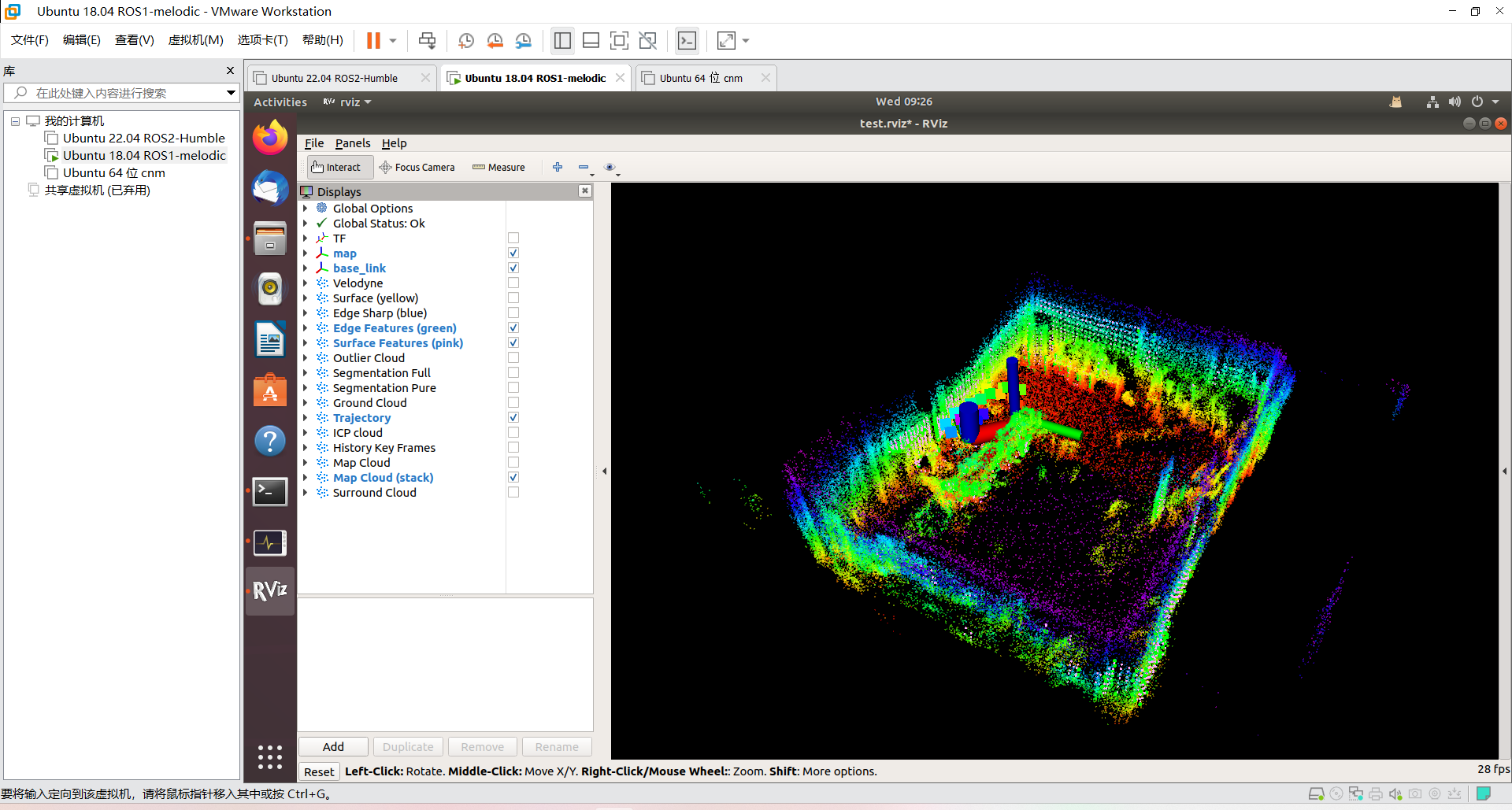
地图保存和数据记录
如果需要保存建好的地图,在建图快要结束时,打开终端订阅全局点云地图的话题/laser_cloud_surround保存为bag包,然后转bag为pcd,使用pcl_viewer打开点云地图
1 | triority@ubuntu:~/Desktop/lidar$ rosbag record /laser_cloud_surround |
此外也可以直接记录雷达原始数据,便于后续对算法进行改进测试比较等
LeGO-LOAM源码分析
引用一下来自google ai studio的源码分析作为大致方向上的参考
好的,我们来大致分析一下 LeGO-LOAM 的源代码结构和核心思想。LeGO-LOAM (Lightweight and Ground-Optimized Lidar Odometry and Mapping) 是对经典 LOAM 算法的改进,特别针对地面车辆(如自动驾驶汽车)的应用场景进行了优化。核心目标: 实现低计算量、实时的激光雷达里程计和建图,并特别优化地面点的处理。
主要代码结构 (基于常见的 ROS 实现):
LeGO-LOAM 通常由以下几个核心的 ROS 节点(或 Nodelet)组成,它们通过 ROS Topic 进行通信:
imageProjection节点 (预处理模块):- 输入: 原始激光雷达点云数据 (
sensor_msgs/PointCloud2),通常来自/points_raw或类似 topic。 - 核心功能:
- 点云分割 (Segmentation):
- 地面分割 (Ground Segmentation): 这是 LeGO-LOAM 的关键优化之一。它将点云投影到一个深度图(Range Image)上,然后利用点与点之间的角度关系或简单的平面拟合方法,快速地将地面点与非地面点分离。这极大地减少了后续处理的点云数量,并移除了可能不稳定的地面特征。
- 点云聚类 (Point Cloud Clustering): 对分割出的非地面点进行聚类(例如使用基于距离或连通性的方法),将点云分割成独立的物体或障碍物。小的、稀疏的聚类会被滤除,以消除噪声和不可靠的特征点。
- 点云信息标记: 为每个点打上标签(地面点、分割后的聚类ID等),并计算每个点的距离、角度等信息,方便后续处理。
- 点云分割 (Segmentation):
- 输出:
- 分割后的点云 (
/segmented_cloud):包含非地面点的聚类结果。 - 地面点云 (
/ground_cloud):单独发布的地面点。 - 外点/噪声点云 (
/outlier_cloud)。 - 点云信息 (
/cloud_info):包含每个点的标签、范围、起始/结束索引等辅助信息。
- 分割后的点云 (
- 输入: 原始激光雷达点云数据 (
featureAssociation节点 (特征提取与里程计模块):- 输入:
imageProjection节点输出的分割点云、地面点云和点云信息。 - 核心功能:
- 特征提取 (Feature Extraction):
- 基于分割后的非地面点云,计算每个点的曲率(Curvature)。
- 根据曲率大小,选取边缘点 (Edge Points) (曲率大的点) 和平面点 (Planar Points) (曲率小的点)。
- 为了提高鲁棒性,会排除一些不稳定的特征点(例如,平行于激光束方向的点、被遮挡的点)。
- LeGO-LOAM 的一个特点是它会分别处理边缘特征和平面特征。
- 激光雷达里程计 (Lidar Odometry):
- 执行扫描到扫描 (Scan-to-Scan) 的匹配。
- 将当前帧提取的边缘点与上一帧的边缘线进行匹配(点到线距离最小化)。
- 将当前帧提取的平面点与上一帧的平面片进行匹配(点到面距离最小化)。
- 两步优化 (Two-Step Optimization): LeGO-LOAM 的另一个关键优化。它首先利用地面点(被视为一个大平面)和分割出的平面点进行匹配,估计车辆的 [z, roll, pitch];然后利用边缘点匹配,估计车辆的 [x, y, yaw]。这种分离优化降低了计算复杂度,并提高了对特定运动的估计精度。
- 使用优化算法(通常是 Levenberg-Marquardt, LM)迭代求解最小化点到线/点到面距离的位姿变换(旋转和平移)。
- 特征提取 (Feature Extraction):
- 输出:
- 高频、但可能存在漂移的激光雷达里程计位姿 (
/laser_odom_to_init)。 - 当前帧提取的特征点云(角点
/laser_cloud_corner_last,平面点/laser_cloud_surf_last),供建图模块使用。
- 高频、但可能存在漂移的激光雷达里程计位姿 (
- 输入:
mapOptmization节点 (建图与位姿优化模块):- 输入:
featureAssociation节点输出的里程计位姿、特征点云。 - 核心功能:
- 地图维护 (Map Maintenance):
- 接收来自
featureAssociation的特征点云和粗略位姿。 - 根据里程计位姿,将历史关键帧的特征点(边缘点和平面点)变换到世界坐标系下,构建一个全局的特征地图(通常用 Voxel Grid 或 K-D Tree 存储,以便快速查找)。
- 接收来自
- 扫描到地图 (Scan-to-Map) 匹配:
- 将当前帧的特征点与全局地图中的对应特征(边缘线、平面片)进行匹配。
- 再次使用优化算法(如 LM),最小化当前帧特征点到地图中对应特征的距离,进一步优化当前帧的位姿。
- 这个过程频率较低(相对于 Odometry),但可以有效修正 Odometry 累积的漂移。
- (可选) 回环检测 (Loop Closure): 一些 LeGO-LOAM 的变种或后续工作会加入回环检测模块,通过识别之前访问过的场景来进一步消除累积误差,但这在原始 LeGO-LOAM 中可能不是核心部分。
- 地图维护 (Map Maintenance):
- 输出:
- 经过地图优化后的、更精确的位姿 (
/aft_mapped_to_init)。 - 构建的全局点云地图 (
/map) 或特征地图。
- 经过地图优化后的、更精确的位姿 (
- 输入:
transformFusion节点 (位姿融合与发布):- 输入:
featureAssociation输出的高频里程计位姿,mapOptmization输出的低频优化位姿。 - 核心功能: 融合这两个位姿信息。通常是将低频的精确位姿作为基准,然后用高频的里程计增量来插值,得到一个平滑、连续、高频发布的最终位姿估计。
- 输出: 最终的车辆位姿 (
/integrated_to_init或 TF 变换)。
- 输入:
核心算法与技术总结:
- 范围图像 (Range Image): 高效处理结构化激光雷达数据(如 Velodyne)的基础。
- 地面分割: 关键优化,显著减少计算量,移除不稳定特征。
- 点云聚类: 过滤噪声,聚焦于有意义的物体。
- 曲率计算: 用于区分边缘点和平面点。
- 特征关联 (点到线/点到面): LOAM 系列算法的核心匹配方式。
- 两步位姿优化: LeGO-LOAM 的特色,分离优化不同自由度,提高效率和精度。
- 迭代优化算法 (Levenberg-Marquardt): 用于求解非线性最小二乘问题(位姿估计)。
- Scan-to-Scan & Scan-to-Map 框架: LOAM 的经典框架,高频里程计+低频地图优化。
代码阅读建议:
- 从
imageProjection开始: 理解预处理流程,特别是地面分割和聚类是如何实现的。 - 接着看
featureAssociation: 关注特征提取(曲率计算、点选择)和两步优化(如何分别使用平面/地面点和边缘点进行匹配和优化)。 - 然后是
mapOptmization: 理解地图如何构建和维护,以及 Scan-to-Map 匹配如何修正位姿。 - 最后看
transformFusion: 理解如何融合高频和低频位姿。 - 关注 ROS 接口: 理解各个节点之间的输入输出(订阅和发布的 Topic),以及它们传递的数据结构 (
sensor_msgs/PointCloud2, 自定义消息如cloud_info,geometry_msgs/PoseStamped,nav_msgs/Odometry, TF)。 - 查看
launch文件和config文件: 这些文件定义了节点如何启动以及各种参数(如特征提取的阈值、优化迭代次数等),理解参数对算法性能的影响很重要。 - 核心库依赖: LeGO-LOAM 大量使用了 PCL (Point Cloud Library) 进行点云处理,以及 Eigen 进行线性代数运算。熟悉这两个库会对理解代码很有帮助。
总的来说,LeGO-LOAM 的源代码体现了在经典 LOAM 基础上,针对特定应用场景(地面车辆)进行巧妙优化的思想,通过地面分割和两步优化等手段,在保证精度的同时显著降低了计算复杂度。
VINS-Mono视觉slam实现
视觉slam算法VINS-Mono
使用wsl环境开发深度相机(已弃用)
此部分内容已经弃用,不打算使用深度相机了,但该过程未来仍有可能有参考价值,故保留。以及在wsl环境下即使挂载了usb设备,intel驱动程序也会报错检测不到深度相机,这一问题还没有解决。
目前还在寒假期间没有实物制作的条件,打算先跑跑仿真,准备好技术路线。目前打算在windows系统中使用wsl2的ubuntu20进行开发
wsl内安装ros后无法启动roscore的问题
1 | triority@Triority-Desktop:~$ roscore |
1 | triority@Triority-Desktop:~$ echo $ROS_MASTER_URI |
创建ros的工作空间之后在src文件夹新建一个包用于试验代码:
1 | catkin_create_pkg lab roscpp rospy std_msgs |
wsl挂载usb设备:
使用usb3.2连接电脑,要在wsl中使用usb设备请参考微软的文档。
首先安装USBIPD-WIN项目
在windows powershell中使用usbipd list查看usb设备列表,然后根据总线ID共享设备usbipd bind --busid 4-4
1 | PS C:\Users\Triority> usbipd list |
接下来应该附加USB设备usbipd attach --wsl --busid 2-1,但是报错:
1 | PS C:\Users\Triority> usbipd attach --wsl --busid 2-1 |
显然需要修改网络模式,这里改成mirrored,这个模式的作用在微软的文档有介绍
也就是配置文件.wslconfig内容为
1 | [wsl2] |
此时将wsl重启wsl --shutdown
1 | PS C:\Users\Triority> usbipd attach --wsl --busid 2-1 |
按照要求强制执行usbipd bind --busid 2-1 --force并重启电脑
此时重新usbipd attach --wsl --busid 2-1并在ubuntu中查看usb设备
1 | triority@Triority-Desktop:~$ lsusb |
Intel D435i相关链接: